速度规划模块 - 理论文档
本文档快速讲解速度规划的理论基础、数学推导和核心算法原理。
目录
概述
什么是速度规划
速度规划是机器人运动控制的核心问题之一,其目标是在满足速度、加速度等约束条件下,生成一条平滑可行的速度曲线,使机器人从起点运动到终点。
为什么需要速度规划
直接对目标位置进行比例控制会导致: - 运动初期速度过快,造成冲击 - 接近目标时容易超调 - 运动不平滑,机械磨损加剧
图片描述:有无速度规划的对比图 - 上半部分(无速度规划):位置响应曲线快速上升,超过目标值后震荡,标注"超调"和"震荡" - 下半部分(有速度规划):位置响应曲线平滑上升,缓慢接近目标值,无超调 - 右侧对比说明框:列出无规划的缺点(冲击、超调、磨损)和有规划的优点(平滑、稳定、低磨损)
速度规划的基本约束
在实际应用中,速度规划必须满足以下物理约束:
其中: - \(v(t)\):时刻 \(t\) 的速度 - \(a(t)\):时刻 \(t\) 的加速度(速度的导数) - \(j(t)\):时刻 \(t\) 的加加速度(加速度的导数,又称Jerk) - \(v_{max}\):最大速度限制 - \(a_{max}\):最大加速度限制 - \(j_{max}\):最大加加速度限制
梯形速度规划
如果你想深入了解速度规划,这里是入门
算法原理
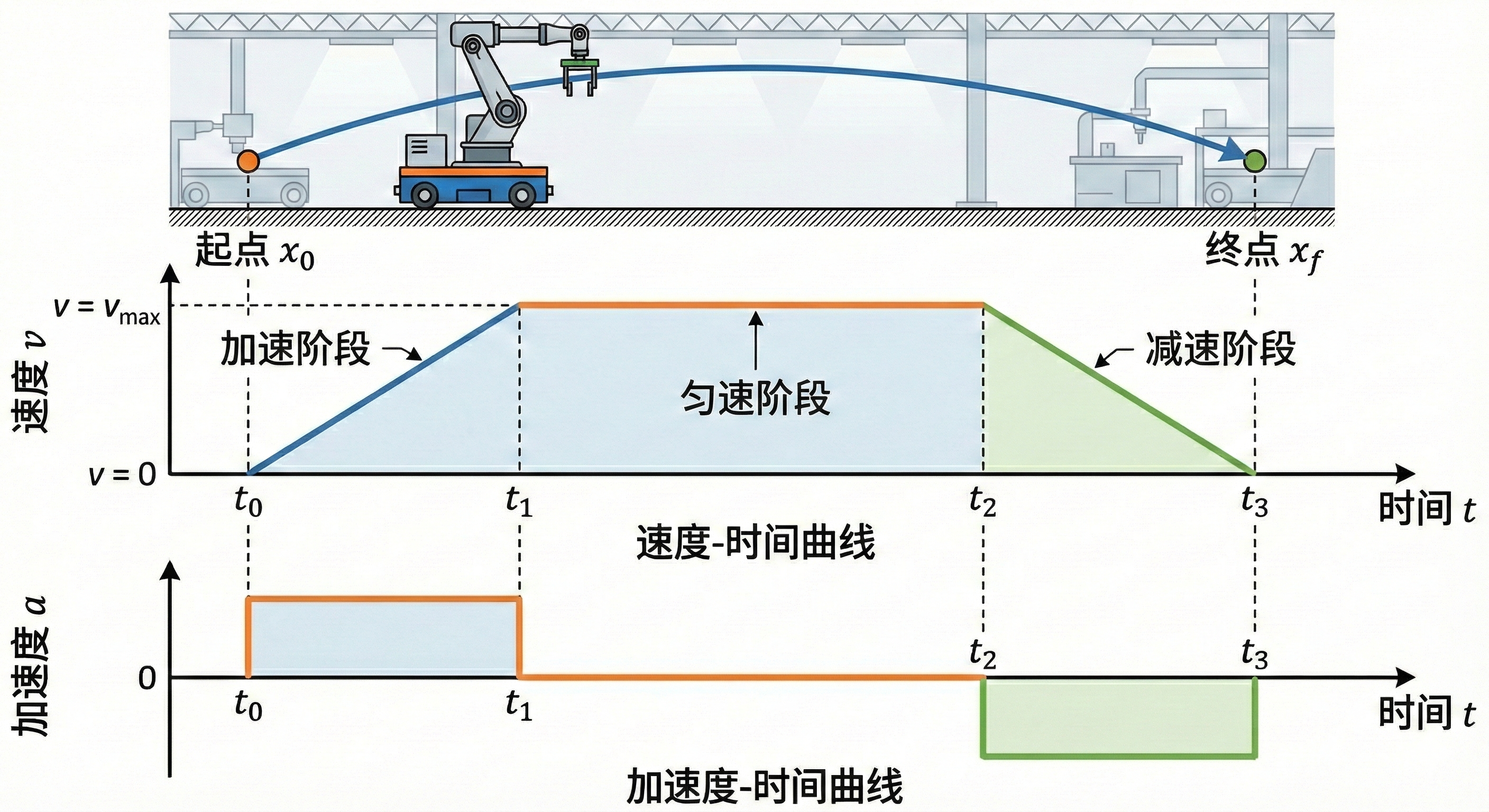
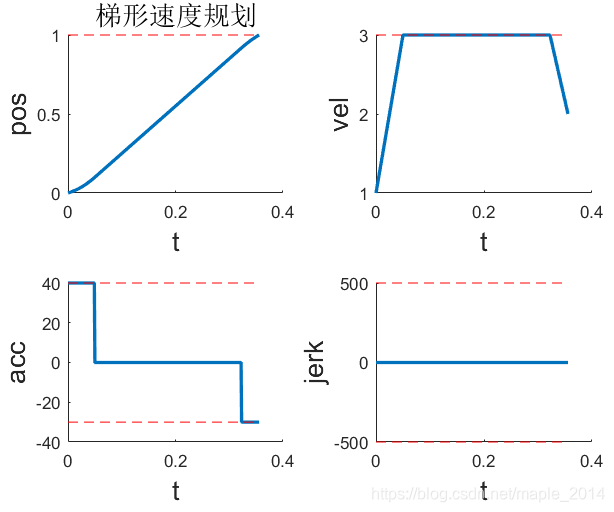
梯形速度规划是最基本的速度规划方法,其速度曲线由三段直线组成,呈现梯形形状。
图片描述:梯形速度规划的速度-时间曲线 - 横轴为时间 \(t\),纵轴为速度 \(v\) - 曲线分为三个阶段: 1. 加速段(0 ~ \(t_1\)):直线上升,斜率为正加速度 \(a_{max}\) 2. 匀速段(\(t_1\) ~ \(t_2\)):水平直线,速度保持 \(v_{max}\) 3. 减速段(\(t_2\) ~ \(t_3\)):直线下降,斜率为负加速度 \(-a_{max}\) - 标注各阶段的时间:加速时间 \(t_a = t_1 - t_0\),匀速时间 \(t_c = t_2 - t_1\),减速时间 \(t_d = t_3 - t_2\) - 总时间 \(T = t_a + t_c + t_d\) - 终点速度 \(v(t_3) = 0\),起点速度 \(v(t_0) = 0\)
数学推导
设总位移为 \(D\),最大速度为 \(V_{max}\),最大加速度为 \(A_{max}\)。
步骤1:计算理论最小位移
若以最大加速度加速到 \(V_{max}\) 后立即减速至0,所需位移:
图片描述:三角形速度曲线(无匀速段) - 速度曲线呈三角形,起始和结束速度为0,顶点速度为 \(V_{max}\) - 加速时间和减速时间相等:\(t_a = t_d = \frac{V_{max}}{A_{max}}\) - 总位移为三角形面积:\(D = \frac{1}{2} \times T \times V_{max} = V_{max} \times \frac{V_{max}}{A_{max}} = \frac{V_{max}^2}{A_{max}}\) - 实际总位移应为两个三角形面积之和(加速+减速):\(D_{total} = 2 \times \frac{V_{max}^2}{A_{max}} = \frac{2V_{max}^2}{A_{max}}\)
步骤2:判断是否达到最大速度
比较 \(D\) 与 \(D_{accel\_decel}\):
- 情况1:\(D \leq D_{accel\_decel}\)(距离太短,无法达到最大速度)
- 实际最大速度 \(V_{peak} = \sqrt{A_{max} \times D}\)
- 加速时间 \(t_a = \frac{V_{peak}}{A_{max}}\)
- 减速时间 \(t_d = t_a\)(对称三角形)
- 无匀速段
- 情况2:\(D > D_{accel\_decel}\)(距离足够,可达到最大速度)
- 实际最大速度 \(V_{peak} = V_{max}\)
- 加速时间 \(t_a = \frac{V_{max}}{A_{max}}\)
- 减速时间 \(t_d = \frac{V_{max}}{A_{max}}\)
- 匀速段时间 \(t_c = \frac{D - D_{accel\_decel}}{V_{max}}\)
图片描述:两种情况的对比 - 左图(情况1,三角形):速度曲线只有加速段和减速段,无匀速段,最大速度 \(V_{peak} < V_{max}\) - 右图(情况2,梯形):速度曲线包含加速段、匀速段、减速段三部分,达到最大速度 \(V_{max}\) - 下方的位移对比图:三角形面积小于梯形面积
步骤3:生成速度曲线
对于每时刻 \(t\),计算对应速度:
算法实现流程图
图片描述:梯形速度规划算法流程图 - 流程图展示以下步骤: 1. 开始 2. 输入:\(D\)(目标位移),\(V_{max}\)(最大速度),\(A_{max}\)(最大加速度) 3. 计算 \(D_{accel\_decel} = 2V_{max}^2 / A_{max}\) 4. 判断:\(D \leq D_{accel\_decel}\)? - 是 → 计算 \(V_{peak} = \sqrt{A_{max} \times D}\),\(t_a = V_{peak} / A_{max}\),\(t_c = 0\) - 否 → 计算 \(t_a = V_{max} / A_{max}\),\(t_c = (D - D_{accel\_decel}) / V_{max}\) 5. 计算总时间 \(T = 2t_a + t_c\) 6. 判断当前时间 \(t\) 所在阶段 - 加速段:\(v = A_{max} \cdot t\) - 匀速段:\(v = V_{max}\) - 减速段:\(v = V_{max} - A_{max} \cdot (t - t_a - t_c)\) 7. 输出速度 \(v(t)\) 8. 结束
优缺点分析
优点: - 实现简单,计算量小 - 易于理解和调试 - 适用于大多数工业场景
缺点: - 加速度突变,存在机械冲击 - 高速运行时舒适性和平稳性较差 - 不适合对冲击敏感的系统(如精密仪器、医疗设备)
余弦速度规划
算法原理
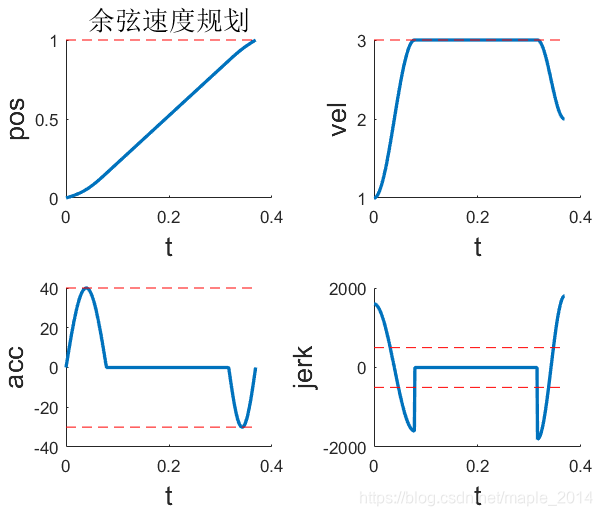
余弦速度规划使用余弦函数生成速度曲线,避免梯形规划中加速度突变的问题。
图片描述:余弦速度规划的速度-时间曲线 - 横轴为时间 \(t\),纵轴为速度 \(v\) - 速度曲线呈余弦波形:从0开始,上升到 \(V_{max}\),再下降到0 - 曲线方程:\(v(t) = \frac{V_{max}}{2} \left[1 - \cos\left(\frac{2\pi t}{T}\right)\right]\) - 标注关键点:起点 \((0, 0)\),中点 \((T/2, V_{max})\),终点 \((T, 0)\) - 曲线平滑,无尖角
数学推导
步骤1:定义速度函数
为使速度曲线从0开始、0结束,且最大值不超过 \(V_{max}\),采用:
其中 \(T\) 为总运动时间。
步骤2:验证边界条件
- 起点:\(v(0) = \frac{V_{max}}{2} [1 - \cos(0)] = \frac{V_{max}}{2} [1 - 1] = 0\) ✓
- 终点:\(v(T) = \frac{V_{max}}{2} [1 - \cos(2\pi)] = \frac{V_{max}}{2} [1 - 1] = 0\) ✓
- 中点:\(v(T/2) = \frac{V_{max}}{2} [1 - \cos(\pi)] = \frac{V_{max}}{2} [1 - (-1)] = V_{max}\) ✓
步骤3:计算加速度
加速度是速度的导数:
图片描述:余弦规划的加速度-时间曲线 - 横轴为时间 \(t\),纵轴为加速度 \(a\) - 加速度曲线呈正弦波形 - 起点加速度 \(a(0) = 0\),避免初始冲击 - 中点加速度 \(a(T/2) = \frac{\pi V_{max}}{T}\)(最大加速度) - 终点加速度 \(a(T) = 0\),平滑停止 - 曲线平滑连续,无突变
步骤4:计算位移
位移是速度的积分:
图片描述:余弦规划的位移-时间曲线 - 横轴为时间 \(t\),纵轴为位移 \(x\) - 位移曲线呈S形,起始和结束处斜率(速度)为0 - 曲线关于中点 \((T/2, D/2)\) 中心对称 - 终点位移 \(x(T) = \frac{V_{max}}{2} [T - 0] = \frac{V_{max}T}{2}\) - 由于 \(\int_0^T \cos(2\pi t/T) dt = 0\),总位移 \(D = \frac{V_{max}T}{2}\)
总时间计算
已知目标位移 \(D\),求解总时间 \(T\):
但此公式未考虑加速度约束。实际应用中需要验证:
若 \(a_{max\_required} \leq A_{max}\),则上述公式成立;否则需要延长总时间 \(T\)。
优缺点分析
优点: - 加速度连续,机械冲击小 - 运动平滑,舒适性好 - 实现简单,无需迭代计算
缺点: - 加速度变化率(Jerk)不均匀 - 最高加速度出现在运动中点 - 无法独立控制最大加速度
图片描述:梯形与余弦规划对比 - 同一坐标系中绘制两条曲线:梯形(虚线)和余弦(实线) - 梯形曲线:加速段斜率恒定(矩形加速度波),匀速段水平,减速段对称 - 余弦曲线:平滑上升和下降,正弦加速度波 - 下方对比表:列出两种方法在加速度连续性、计算复杂度、冲击大小等维度的对比
S形速度规划
(本节框架已预留,内容待补充)
概述
S形速度规划(又称七段式速度规划)通过控制加加速度(Jerk),实现更平滑的运动。其速度曲线呈S形,故得名。
核心思想
S形规划将整个运动过程分为7个阶段: 1. 匀加速段(Jerk = \(J_{max}\)) 2. 变加速段(Jerk线性减小到0,加速度恒定) 3. 匀减速段(Jerk = \(-J_{max}\)) 4. 匀速段 5. 匀减速段 6. 变减速段 7. 匀加速段
关键公式
(请在此处补充S形速度规划的相关公式推导)
速度曲线
(请在此处补充S形速度规划的速度-时间、加速度-时间、Jerk-时间曲线图)
实现要点
(请在此处补充S形速度规划的实现注意事项)
微分追踪器理论
理论背景
在控制系统中,直接对输入信号进行微分会放大噪声,导致控制效果恶化。传统做法是使用低通滤波器,但这会引入相位延迟。
微分追踪器(Differentiator)是自抗扰控制(ADRC)的核心组件,通过安排过渡过程(Transition Process),在不放大噪声的前提下获得输入信号的微分估计。
核心思想
微分追踪器的设计目标: 1. 大误差时:快速响应,"油门焊死"追踪目标 2. 接近目标时:平滑过渡,避免超调和震荡
图片描述:微分追踪器的工作原理 - 上图:传统微分器与微分追踪器的对比 - 传统微分器:输入信号突变时输出尖峰脉冲(噪声放大) - 微分追踪器:输入信号突变时输出平滑的过渡过程 - 下图:微分追踪器的输入-输出关系 - 输入:阶跃信号(目标值) - 输出:平滑的跟踪信号及其微分
数学模型
微分追踪器通过以下状态方程实现:
其中: - \(x_1\):对输入信号的跟踪估计 - \(x_2\):输入信号的微分估计 - \(x_3\):内部状态变量 - \(R\):跟踪速度因子(越大响应越快) - \(h\):滤波因子(越大滤波效果越好) - \(e\):跟踪误差,\(e = v_0 - x_1\)(\(v_0\) 为输入信号)
fhan函数详解
fhan(Fastest Handian Nonlinear Function,最速控制函数)是微分追踪器的核心非线性函数:
其中: $\(d = R \cdot h^2\)$ $\(a_0 = h \cdot x_2 + x_1\)$ $\(a_1 = \sqrt{d \cdot (R \cdot h + 0.5 \cdot |x_1| \cdot h + |x_2| \cdot h^2)}\)$ $\(a = \frac{a_0 + \text{sign}(a_1) \cdot a_1 + x_1}{2}\)$ $\(\delta = R \cdot h\)$
图片描述:fhan函数的结构图 - 输入:\(e\)(误差)、\(\dot{e}\)(误差微分)、\(R\)(速度因子)、\(h\)(滤波因子) - 计算中间变量:\(d\)、\(a_0\)、\(a_1\)、\(a\)、\(\delta\) - 条件判断:\(|d| > \delta\) 还是 \(|d| \leq \delta\) - 输出:\(fhan\) 值 - 标注关键阈值:\(\delta = R \cdot h\)
图片描述:fhan函数的输出特性 - 横轴:输入误差 \(e\) - 纵轴:输出 \(fhan\) - 曲线分为两个区域: - 线性区(\(|e| < \delta\)):输出与输入近似线性关系,平滑过渡 - 饱和区(\(|e| > \delta\)):输出饱和,趋向最快速响应 - 标注饱和值:\(\pm R\)
fhan函数的作用机理
当误差较大时(\(|e| > \delta\)):
系统以最大速度 \(R\) 快速逼近目标,体现"油门焊死"的特性。
当误差较小且速度较大时(\(|e| \leq \delta\) 但 \(|\dot{e}|\) 较大):
引入阻尼项,抑制速度过快,防止超调。
当接近目标时(\(|e| \leq \delta\) 且 \(|\dot{e}|\) 较小):
退化为PD控制,实现平滑收敛。
图片描述:fhan函数的三段特性 - 区域1(大误差):饱和输出 \(-R\),最快速响应 - 区域2(中等误差):线性过渡,阻尼作用 - 区域3(小误差):PD控制,平滑收敛 - 标注各区域的误差范围和输出特性
微分追踪器的工作流程
图片描述:微分追踪器算法流程图 - 输入:目标值 \(v_0\),测量值 \(y\),时间间隔 \(dt\) - 步骤1:计算跟踪误差 \(e = v_0 - x_1\) - 步骤2:计算 \(d = R \cdot h^2\) - 步骤3:计算 \(a_0 = h \cdot x_2 + x_1\) - 步骤4:计算 \(a_1 = \sqrt{d \cdot (R \cdot h + 0.5 \cdot |x_1| \cdot h + |x_2| \cdot h^2)}\) - 步骤5:计算 \(a = \frac{a_0 + \text{sign}(a_1) \cdot a_1 + x_1}{2}\) - 步骤6:计算 \(\delta = R \cdot h\) - 步骤7:条件判断 - 若 \(|d| > \delta\):\(fhan = -R \cdot \text{sign}(a - x_1)\) - 若 \(|d| \leq \delta\):\(fhan = -R \cdot \frac{a - x_1}{h}\) - 步骤8:更新状态 - \(x_3 = fhan\) - \(x_2 = x_2 + x_3 \cdot dt\) - \(x_1 = x_1 + x_2 \cdot dt\) - 输出:\(x_2\)(微分估计),\(x_1\)(跟踪值)
参数分析
参数 \(R\)(跟踪速度因子):
- 物理意义:系统响应的最大加速度
- 增大 \(R\):响应更快,但噪声放大
- 减小 \(R\):系统更平滑,但响应变慢
- 建议范围:\(10^4 \sim 10^7\)(根据系统特性调整)
参数 \(h\)(滤波因子):
- 物理意义:相当于滤波时间常数
- 增大 \(h\):滤波效果增强,延迟增加
- 减小 \(h\):响应更快,但噪声敏感
- 建议范围:\(0.001 \sim 0.1\) 秒
参数 \(h_0\)(初始滤波因子):
- 用于首次计算,避免初始冲击
- 通常设为与 \(h\) 相同
图片描述:参数 \(R\) 对响应的影响 - 同一坐标系中绘制三条曲线 - \(R_1\) 较小:响应慢,平滑 - \(R_2\) 中等:平衡响应速度和噪声 - \(R_3\) 较大:响应快,但有轻微震荡 - 标注各曲线的上升时间和超调量
图片描述:参数 \(h\) 对噪声的影响 - 上图:不同 \(h\) 值下的跟踪效果 - \(h\) 较小:跟踪快,但噪声明显 - \(h\) 较大:跟踪平滑,但有延迟 - 下图:对应的微分输出 - \(h\) 较小时:微分输出噪声大 - \(h\) 较大时:微分输出平滑
与传统方法的对比
| 特性 | 传统微分器 | 高通滤波 | 微分追踪器 |
|---|---|---|---|
| 噪声放大 | 严重 | 较小 | 可控 |
| 相位延迟 | 无 | 较大 | 较小 |
| 计算复杂度 | 低 | 低 | 中等 |
| 参数调节 | 无 | 简单 | 需要经验 |
| 适用场景 | 低噪声环境 | 一般场景 | 高噪声场景 |
图片描述:三种方法的阶跃响应对比 - 输入:单位阶跃信号 - 曲线1(传统微分器):输出尖峰脉冲,幅值趋向无穷大 - 曲线2(高通滤波):输出有延迟,且有稳态误差 - 曲线3(微分追踪器):输出平滑跟踪,无超调,无延迟 - 下方标注:各方法的上升时间、超调量、稳态误差
应用场景
微分追踪器适用于: 1. 需要获取速度/加速度估计的场合 2. 输入信号存在噪声或跳变的系统 3. 对控制平滑性要求高的场景 4. 作为自抗扰控制器(ADRC)的核心组件
对比分析
三种速度规划方法对比
| 特性 | 梯形 | 余弦 | S形 |
|---|---|---|---|
| 加速度连续性 | 突变 | 连续 | 连续 |
| Jerk连续性 | 突变 | 突变 | 连续 |
| 计算复杂度 | 低 | 低 | 中 |
| 实现难度 | 易 | 易 | 难 |
| 运动平滑性 | 一般 | 较好 | 最好 |
| 适用场景 | 工业机器人 | 一般运动 | 精密运动 |
图片描述:三种方法的速度-加速度对比 - 三列图:梯形、余弦、S形 - 每列两行:上图为速度-时间曲线,下图为加速度-时间曲线 - 梯形:加速度矩形波,有突变 - 余弦:加速度正弦波,连续但不平滑 - S形:加速度平滑曲线,完全连续
速度规划与微分追踪器的对比
| 特性 | 速度规划 | 微分追踪器 |
|---|---|---|
| 目标 | 生成可行轨迹 | 估计信号微分 |
| 输入 | 起终点位置 | 任意输入信号 |
| 输出 | 速度曲线 | 微分估计值 |
| 约束处理 | 显式处理 | 隐式处理 |
| 典型应用 | 轨迹生成 | 状态估计 |
图片描述:两种方法的协同使用 - 流程图:目标位置 → 速度规划 → 速度指令 → 微分追踪器 → 速度/加速度估计 → 控制器 → 执行器 - 说明:速度规划生成参考轨迹,微分追踪器平滑处理参考信号并提供微分估计,两者配合实现精确控制
参考文献
- 韩京清. 自抗扰控制技术. 国防工业出版社, 2008.
- Gao, Z. "Active Disturbance Rejection Control: A Paradigm Shift in Feedback Control System Design." Proceedings of the 2006 American Control Conference, 2006.
- Lynch, K. M., & Park, F. C. Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, 2017.
- Biagiotti, L., & Melchiorri, C. Trajectory Planning for Automatic Machines and Robots. Springer, 2008.
- 速度规划(梯形、余弦、多项式、7段S型、7段修正S型、15段S型、31段S型)-CSDN博客 部分图片出处
文档版本:v1.0 最后更新:2024-XX-XX