Web_of_Jackrainman
时钟树
正在初始化搜索引擎
Home
About
控制理论
底盘
速度规划
更多
Web_of_Jackrainman
Home
About
控制理论
控制理论
学习路径指南
重新理解控制论
机器人控制系统的分层设计与算法选型方法
PID控制算法原理与应用
控制理论基础
何谓自抗扰
LADRC算法详解
LADRC代码实战
LADRC实战指南
高级控制理论
MCU与上位机的控制分层
现代控制与最优控制导论
智能控制与强化学习导论
PID,前馈,TD
自适应前馈
学习路径(个人版)
学习路径(研究总稿)
底盘
底盘
写在前面
底盘正解算
底盘解算
steering_wheel与底盘全链路坐标轴约定
速度规划
速度规划
写在前面
速度规划-理论
速度规划+卷积
TD
更多
更多
电机
电机
电机基础
电机驱动代码详细讲解
大疆驱动讲解
AK Motor 使用指南
DJI Motor
VESC
嵌入式实践
嵌入式实践
CAN总线基础
CAN报文列表
CAN报文代码
FreeRTOS
FreeRTOS
调度
STM32CubeMX
STM32CubeMX
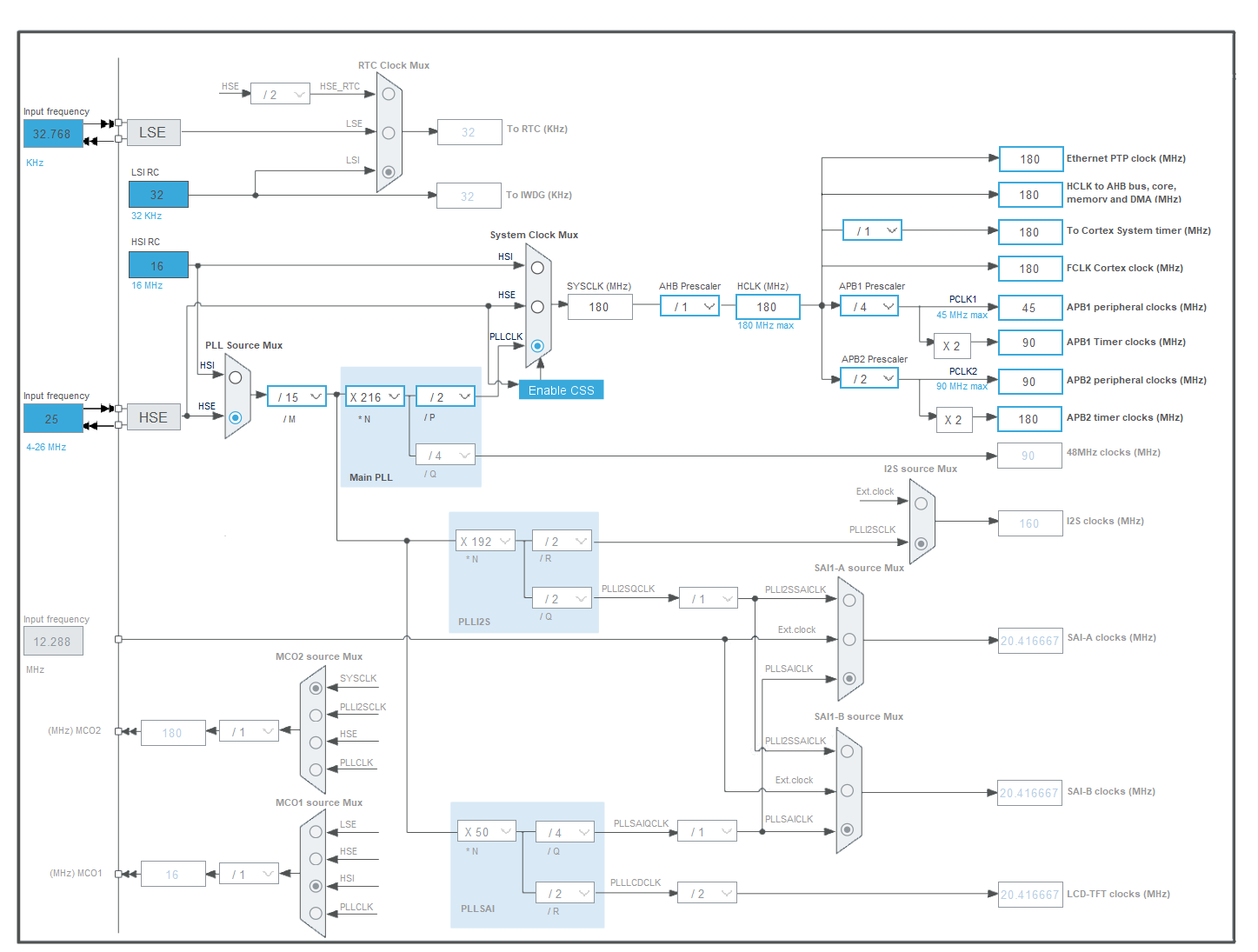
时钟树
单片机
单片机
寄存器
GPIO
SWD烧录
USART
DMA
FLASH模拟EEPROM
SPI FLASH
学习文档
时钟树
评论
回到页面顶部