用户手册
伺服模式 (角度为角度制)
伺服模式下,推荐使用位置速度模式。
位置速度模式爆发力不如位置模式(速度与加速度固定),整体呈一个三角波或者梯形波加减速(取决于加速度与速度) 但是售后说尽量避免用位置模式(它是以最高扭矩的形式转动)。
MIT模式(角度为弧度制)
使用MIT模式时,必须先进入MIT控制模式,必须先开电机再开控制板(或者先开板子,再开电机,然后按RST)。 1. 位置MIT模式 位置MIT模式下,Torque,Speed均为0,,POS,KP,KD不得为0(需要调整KPKD去控制角度精准转动)。kd 不能赋 0,否则会造成电机震荡,甚至失控。 当POS是随时间变化的连续可导函数时,同时Speed是POS的导数,可实现位置跟踪和速度跟踪,即按照期望速度旋转期望角度。 2. 速度MIT模式 速度MIT模式下,Pos,Torque,KP均为0,KD与SPEED不为0.(SPEED单位是rad/s)。KD不宜过大,会引起震荡。 3. 力矩MIT模式 当Pos,Speed,KP,KD均为0,给定Torque 即可实现给定扭矩输出。在该情况下,电机会持续输出一个恒定力矩。但是当电机空转或负载较小时,如果给定Torque 较大,电机会持续加速,直到最大速度,这时也仍然达不到目标力矩Torque。
伺服模式与MIT模式与要注意的地方
- 模式切换只能在上位机中进行。
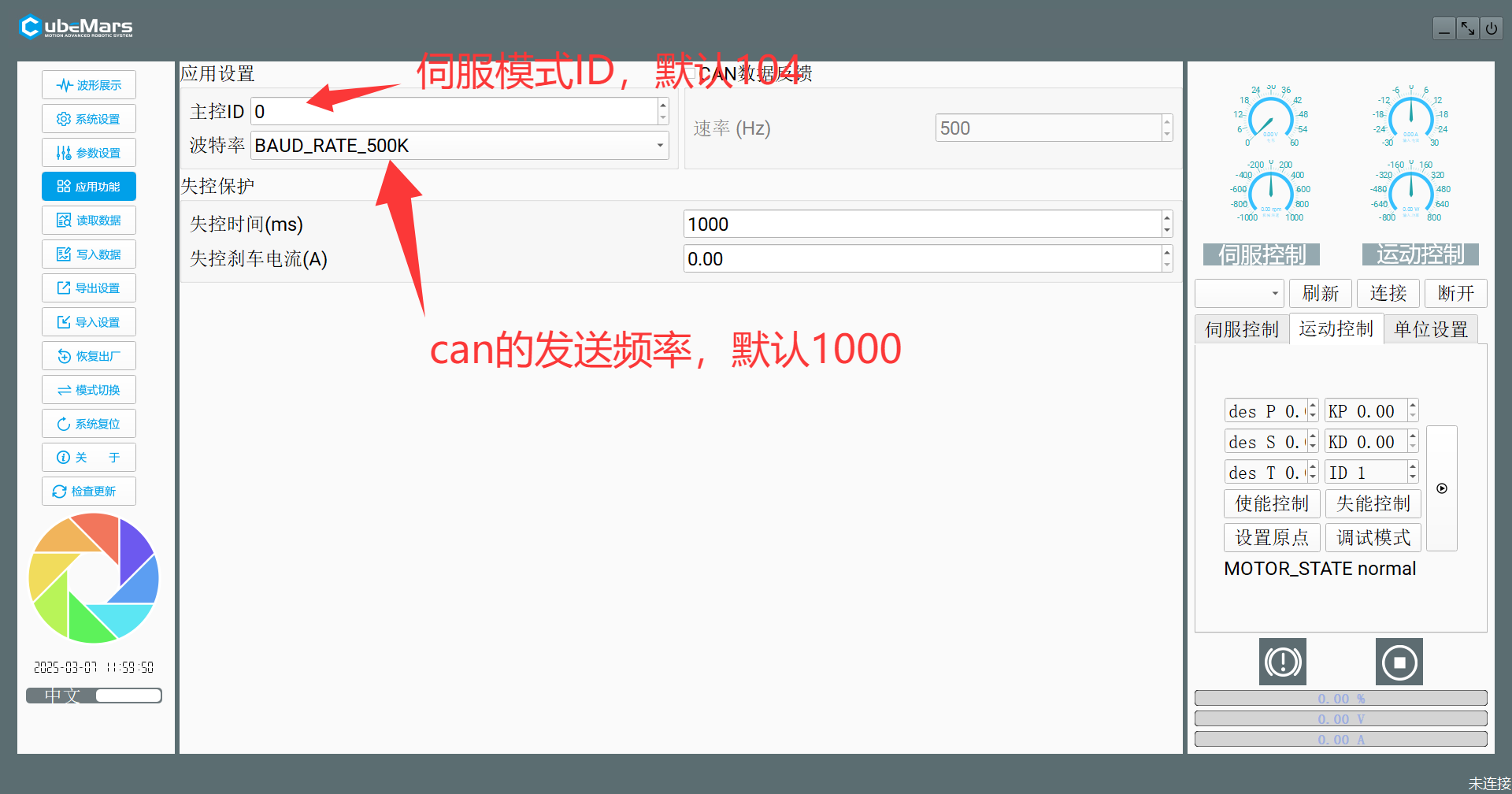
- 伺服模式的控制ID与CAN频率配置见下图
 MIT配置ID与CAN发送频率模式见下图
MIT配置ID与CAN发送频率模式见下图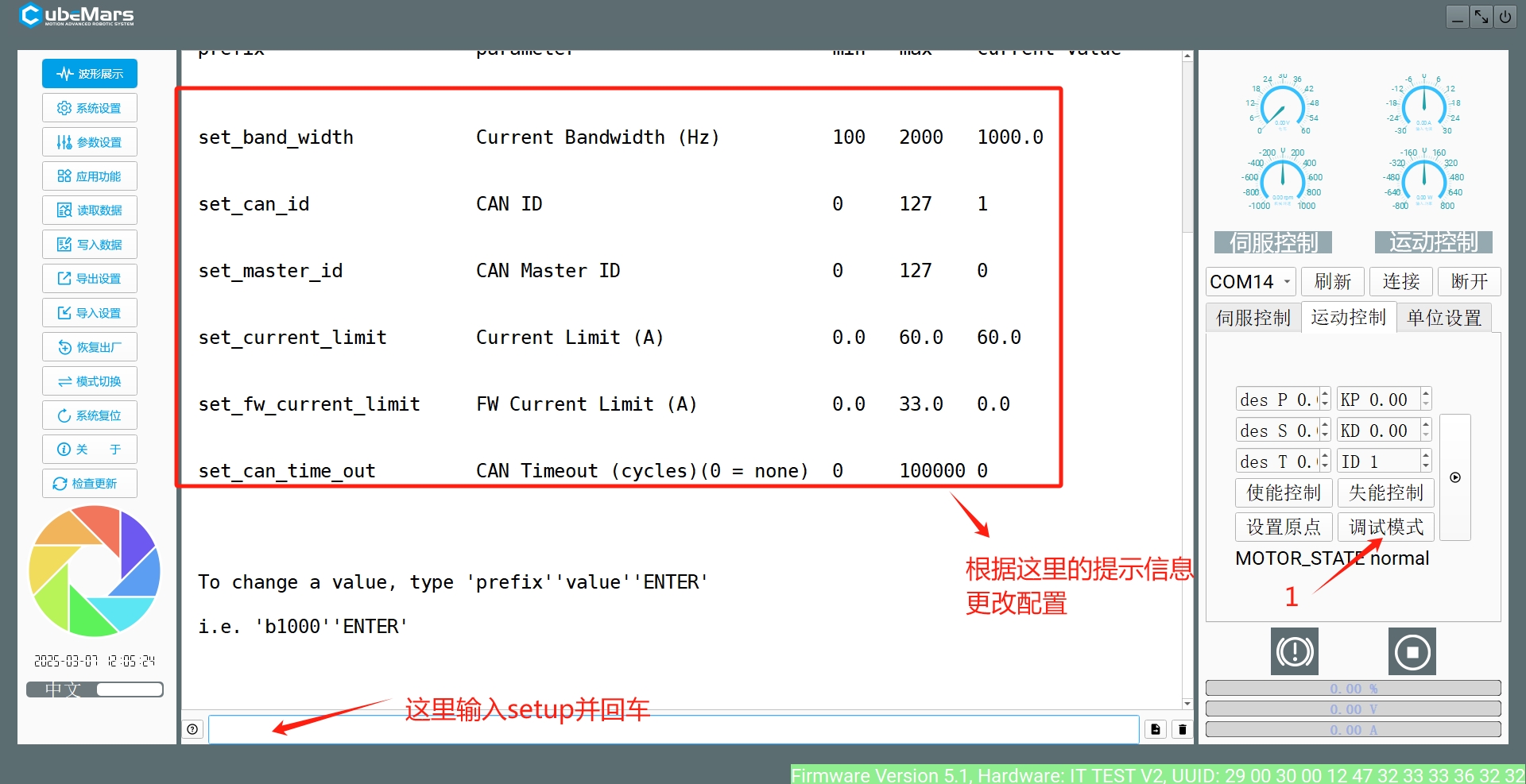
- 使用AK80-8电机前务必观看使用教程视频https://www.bilibili.com/video/BV1Ge4y1F7zS/?spm_id_from=333.1387.homepage.video_card.click&vd_source=9ae4219441eae225310ea1af88ade4f6 与相关使用说明https://www.cubemars.com/cn/article-261-Technical+Support+and+Download.html
- 更改配置时,切记先读取数据,再写入数据,如果造成电机故障,最好的办法找客服:
 (如果失效,去cubemars公众号看一下,总会有的) 加上面这个人,跟他说我要加涂源普(仅限工作日上班时间)
(如果失效,去cubemars公众号看一下,总会有的) 加上面这个人,跟他说我要加涂源普(仅限工作日上班时间) - 当然你也可以按照cubemars官网(见上)和使用说明书,自己去刷固件和校准电机(变砖头的概率比较大,不过说明书里有抢救办法,可以尝试一下,实在不行还可以找涂源普)