写在前面
所有讨论的坐标系,全都是右手系,全都是右手系,全都是右手系!
底盘运动学解算中,按照主流的业界惯例和标准,向前通常是 X 轴。 机器人学与 ROS 标准(REP 103)中, - X 轴:正前方 (Forward) - Y 轴:正左方 (Left) - Z 轴:正上方 (Up)
在这种坐标系下,底盘的运动学变量通常表示为:
- 前进线速度:\(vx\)
- 横向平移速度(针对全向轮或麦克纳姆轮底盘):\(vy\)
- 绕中心旋转的角速度(偏航角速度):\(ωz\)
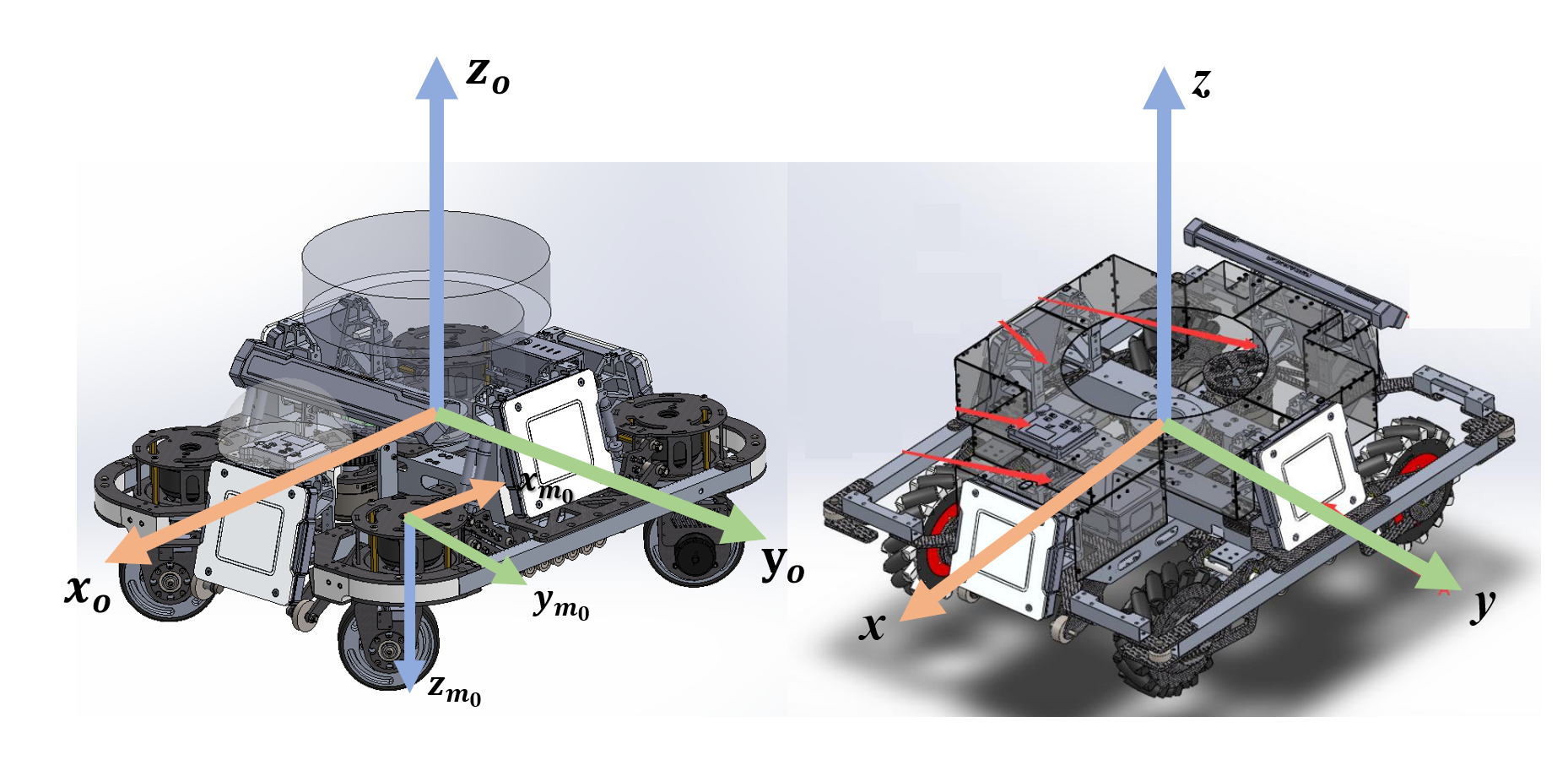 图片取自 HELLO WORLD 战队知识库,仅作学习交流使用,如有侵权可联系作者删除
图片取自 HELLO WORLD 战队知识库,仅作学习交流使用,如有侵权可联系作者删除
但是大多数人想象中的坐标轴其实是这样的: X 轴向右,Y 轴向上,Z 轴垂直纸面向外的标准数学笛卡尔坐标系。