CAN 通信列表模块 (CAN List)
最近修改日期 :2026-01-28
预计阅读时间:15-20 分钟
参与者:Deadline039(作者),Jackrainman(文档编写)
版本:1.0
相关文档: - CAN List详解 - 完整 API 参考与模块文档 - CAN总线基础 - CAN 总线基础知识
1. 概述
1.1 模块简介
CAN-List 是一个专为 STM32 设计的 CAN 消息分发器 (Dispatcher)。在机器人开发中,总线上会有大量传感器和电机反馈数据。本模块的核心作用是:根据收到的 CAN ID,自动找到对应的设备对象并调用其处理函数。
它解决了传统开发中 switch-case 语句过于冗长、难以维护的问题,通过哈希表 (Hash Table) 实现了高效的查询。
1.2 核心功能
- 高效分发:收到 CAN 消息后,根据 ID 快速查找并调用对应的回调函数,避免在中断中进行复杂的
if-else判断。 - 多外设兼容:同时支持 STM32 的 bxCAN (CAN 2.0) 和 FDCAN 外设,通过宏定义切换。
- RTOS 支持:可选集成 FreeRTOS,将消息处理从中断服务函数(ISR)转移到任务线程中,减少中断占用时间。
- 掩码匹配机制:支持 ID 掩码,允许对 ID 的特定位进行匹配,适应复杂协议。
- 动态管理:支持运行时添加、删除节点和更改回调函数。
1.3 适用场景
- 需要处理大量不同 CAN ID 设备的机器人底盘或云台控制。
- 需要统一管理 CAN 通信回调逻辑的工程项目。
- 对实时性要求较高,需要快速中断响应的系统。
2. 集成指南
2.1 文件部署
- 将
can_list文件夹整体复制到工程目录/Drivers/bsp/下。 - 在板级支持包头文件(如
bsp.h)中包含本模块:
2.2 依赖说明
- 必需:标准库
<stdlib.h>(用于内存管理)。 - 可选:FreeRTOS (若开启 RTOS 模式)。
- 配置:需依赖项目的
CSP_Config.h或相应的 HAL 库头文件。
3. 配置宏说明
在 can_list.h 中根据硬件平台和需求修改以下宏定义:
| 宏定义名称 | 默认值 | 说明 |
|---|---|---|
CAN_LIST_USE_FDCAN | 0 | 硬件选择 。1: 启用 FDCAN 支持 (如 STM32G4/H7)。0: 启用 bxCAN 支持 (如 STM32F1/F4)。 |
CAN_LIST_MAX_CAN_NUMBER | 3 | 最大外设数量。 限制系统支持的 CAN 控制器总数,防止数组越界。 |
CAN_LIST_USE_RTOS | 1 | 系统集成。1: 创建 FreeRTOS 任务处理消息,需确保 CAN 中断优先级低于 FreeRTOS 管理的最大优先级。0: 在中断回调中直接处理消息。 |
CAN_LIST_MALLOC | malloc | 内存分配函数,可替换为自定义实现。 |
CAN_LIST_CALLOC | calloc | 内存分配函数(带清零),可替换为自定义实现。 |
CAN_LIST_FREE | free | 内存释放函数,可替换为自定义实现。 |
CAN_LIST_TASK_NAME | "Can list" | FreeRTOS 任务名称(仅 RTOS 模式)。 |
CAN_LIST_TASK_PRIORITY | 2 | FreeRTOS 任务优先级(仅 RTOS 模式)。 |
CAN_LSIT_TASK_STK_SIZE | 256 | FreeRTOS 任务栈大小(仅 RTOS 模式)。 |
CAN_LIST_QUEUE_LENGTH | 5 | FreeRTOS 消息队列长度(仅 RTOS 模式)。 |
注意:若启用 RTOS 模式,务必在调用
vTaskStartScheduler()之后再使用can_list_add_can进行初始化。
4. API 参考手册
4.1 数据类型
can_rx_header_t
统一的消息头结构体,兼容 FDCAN 和 bxCAN。
can_callback_t
回调函数类型定义。
4.2 函数说明
can_list_add_can – 初始化 CAN 列表
创建一个用于管理特定 CAN 外设的哈希表。
参数: * can_select:目标 CAN 外设(如 can1_selected)。 * std_len:标准帧 ID 哈希表的桶(Bucket)长度。 * ext_len:扩展帧 ID 哈希表的桶(Bucket)长度。
返回值: * 0:成功。 * 1:CAN 选择无效(超出 CAN_LIST_MAX_CAN_NUMBER)。 * 2:该 CAN 已创建。 * 3:内存分配失败。
性能调优: * len 值越大,哈希冲突概率越低,查表速度越快,但内存占用增加。 * 若将 len 设置为 1,结构将退化为普通单向链表。
can_list_add_new_node – 注册接收节点
向 CAN 列表中添加一个新的设备节点及其回调函数。
参数: * can_select:使用哪个 CAN 外设接收。 * node_data:设备对象指针。触发回调时,该指针将作为参数传入,用于区分不同设备实例。 * id:期望匹配的 CAN ID(通常为设备反馈的 ID)。 * id_mask:ID 掩码。用于屏蔽 ID 中不相关的位(如包含状态码的高位)。匹配逻辑为:id == (received_id & mask)。 * id_type:ID 类型(CAN_ID_STD 或 CAN_ID_EXT)。 * callback:接收到匹配数据后的回调函数。不能为空。
返回值: * 0:成功。 * 1:CAN 选择无效。 * 2:该 CAN 表未创建。 * 3:参数无效(如 callback 为空或 id_type 错误)。 * 4:该 ID 已存在于表中。 * 5:内存分配失败。
can_list_del_node_by_id – 删除节点
通过 ID 删除已注册的节点。
参数: * can_select:目标 CAN 外设。 * id_type:ID 类型(CAN_ID_STD 或 CAN_ID_EXT)。 * id:要删除的节点 ID。
返回值: * 0:成功。 * 1:CAN 选择无效。 * 2:该 CAN 表未创建。 * 3:参数无效(id_type 错误)。 * 4:节点不存在。
can_list_change_callback – 更改回调函数
动态更改已注册节点的回调函数。
参数: * can_select:目标 CAN 外设。 * id_type:ID 类型(CAN_ID_STD 或 CAN_ID_EXT)。 * id:目标节点 ID。 * new_callback:新的回调函数。
返回值: * 0:成功。 * 1:CAN 选择无效。 * 2:该 CAN 表未创建。 * 3:参数无效(id_type 错误)。 * 4:节点不存在。
5. 数据结构
每个 CAN 外设(如 CAN1, CAN2)都有一个独立的 can_table_t 指针,存储在全局数组中。
提示:如需了解数据结构的深度解析(指针与多级结构、哈希表设计原理),请参考 CAN_List.md 第5章。
6. 架构详解
6.1 数据流架构图
为了便于理解数据从硬件中断到用户回调的全过程,请参考以下数据流向图:
graph LR
HW[硬件 FIFO] -->|中断触发| ISR[中断服务函数]
ISR -->|RTOS 路径: 写入队列| Q[FreeRTOS 消息队列]
ISR -->|非 RTOS 路径: 直接调用| PROCESS[协议处理核心]
Q -->|任务唤醒| PROCESS
PROCESS -->|HAL_GetRxMessage| READ[读取寄存器数据]
READ -->|id % len| HASH[定位哈希桶]
HASH -->|id & mask| MATCH[链表遍历与匹配]
MATCH -->|Callback| USER[用户业务逻辑]bxCAN 中断系统架构
bxCAN 占用 4 个专用的中断向量,以保证通信的实时性。下图展示了中断标志位(Flag)与使能位(Enable)的 与逻辑 关系:
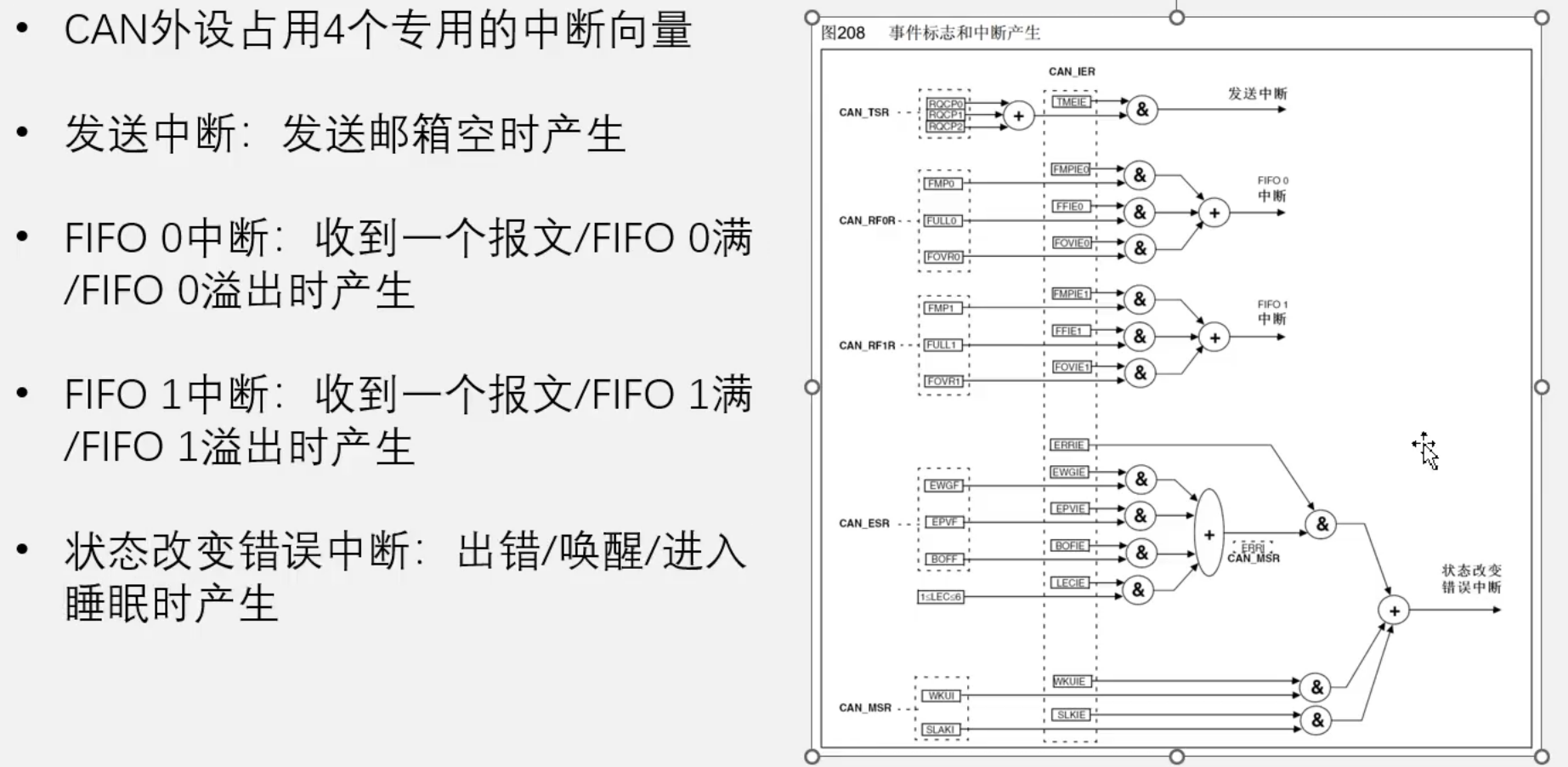
如图所示:
- 发送中断 (TX):当 3 个发送邮箱中至少有一个变为空(发送完成)时产生。
- FIFO 0 中断 & FIFO 1 中断:
- 收到新报文(FMP)。
- FIFO 满(FULL)。
- FIFO 溢出(OVR)。
- 状态改变错误中断 (SCE):处理出错(Error)、唤醒(Wakeup)或进入睡眠(Sleep)等事件。
6.2 详细数据流解析
我们将数据处理流程拆解为四个关键阶段:中断接收、任务调度、路由匹配、用户回调。
阶段一:数据源头与中断接收 (Entry Point)
当 STM32 的 CAN 外设收到一帧完整报文并存入硬件 FIFO(先进先出缓存)后,会触发中断服务函数 (ISR)。
根据是否使用 RTOS,处理逻辑分为两条路径:
- RTOS 路径(异步高效模式,推荐)
- 核心思想:ISR 仅负责"通知",不做繁重处理,确保系统高实时性。
- 操作流程:
- 打包元数据:将 CAN 句柄 (
hcan) 和 FIFO 编号 (rx_fifo) 封装入结构体。 - 推入队列:调用
xQueueSendFromISR将消息发送至后台任务队列。 - 屏蔽中断 (仅 bxCAN):暂时关闭当前中断,防止在后台处理完成前重复触发导致溢出。
- 打包元数据:将 CAN 句柄 (
- 非 RTOS 路径(同步模式)
- ISR 直接调用
can_message_process,在中断上下文中完成所有解析工作。
- ISR 直接调用
代码示例 (can_list.c):
阶段二:数据获取与格式统一 (Data Retrieval)
后台任务 can_list_polling_task 平时处于阻塞状态。一旦队列收到消息,任务立即被唤醒并执行以下操作:
- 读取硬件寄存器:根据 HAL 库差异,调用
HAL_CAN_GetRxMessage(bxCAN) 或HAL_FDCAN_GetRxMessage(FDCAN)。 - 数据搬运:将数据从外设寄存器转移到内存变量
rx_header(帧头信息) 和rx_data(数据载荷)。 - 恢复中断:对于 bxCAN,读取完成后立即调用
HAL_CAN_ActivateNotification重新开启接收中断。
阶段三:哈希路由与掩码匹配 (Core Logic)
这是本模块的核心逻辑,决定了数据属于哪个设备。
- 哈希定位 (Hash Mapping)
- 根据 ID 类型(标准帧或扩展帧)选择对应的哈希表。
- 使用取模运算直接定位链表头:
index = id % table->len。此算法避免了全局遍历,极大降低了 CPU 占用率。
- 链表遍历与掩码过滤
- 由于哈希冲突的存在,同一索引下可能挂载多个节点,需遍历链表。
- 掩码 (Mask) 机制:判断逻辑为
node->id == (received_id & node->id_mask)。 - 应用场景:若设备 ID 包含动态数据(如最后 8 位为动态值),可将 Mask 设为
0xFFFFFF00,实现对一类 ID 的模糊匹配。
核心逻辑代码:
阶段四:数据交付与回调执行 (Callback)
当匹配到注册节点 node 后,数据流到达终点。
- 格式标准化:将不同外设的头文件信息统一转换为
can_rx_header_t结构体,确保用户层接口一致。 - 透传设备指针:
node->can_data是用户注册时绑定的设备对象指针(例如电机结构体&motor1)。 - 函数调用:
此时,控制权正式移交给用户的业务逻辑层。
7. 核心机制:ID 匹配与掩码逻辑
在复杂的协议中,一个 ID 可能包含多种信息(如:ID 的前几位是错误码,后几位才是设备号)。掩码机制允许我们只匹配关心的位。
7.1 掩码匹配公式
系统使用位运算来判断收到的消息是否属于某个节点:
简单来说,就是做与运算。
7.2 实际案例
假设电机反馈 ID 格式:低 8 位是设备 ID,高 24 位包含错误码和模式(动态变化)。
配置示例:
7.3 掩码设置指南
| 需求场景 | 掩码设置 | 说明 |
|---|---|---|
| 全匹配 | 0x1FFFFFFF (扩展帧) 或 0x7FF (标准帧) | 所有位都必须匹配 |
| 匹配低 8 位 | 0x000000FF | 只比较 ID 的低 8 位 |
| 匹配低 16 位 | 0x0000FFFF | 只比较 ID 的低 16 位 |
提示:如需了解掩码机制深度剖析、位运算原理、复杂应用场景,请参考 CAN_List.md 第4章"掩码机制深度剖析"。
8. 使用示例
8.1 场景描述
假设我们控制一个电机设备,通信协议定义如下:
- 主机 (Master) :控制端(我们)。
- 设备 (Device) :被控端(电机)。
- 反馈帧 (Device -> Master) :使用扩展帧。
- ID 格式:
[29:22] 错误码 | [21:14] 模式 | [13:11] 数据标识 | [10:8] 保留 | [7:0] Master ID。 - 我们只关心
[7:0]位是否匹配 Master ID。
- ID 格式:
- 控制帧 (Master -> Device) :
- ID 格式:
[15:8] Master ID | [7:0] Dev ID。
- ID 格式:
8.2 回调函数定义
回调函数必须符合 can_callback_t 类型:
8.3 业务逻辑实现
9. 常见问题解答
9.1 为什么启用 RTOS 模式后,CAN 中断优先级必须低于 FreeRTOS 管理的最大优先级?
FreeRTOS 使用 PendSV 和 SysTick 异常进行任务调度,这些异常的优先级通常设置为最低可编程优先级。如果 CAN 中断优先级高于 FreeRTOS 管理的优先级,当中断发生时,FreeRTOS 无法进行任务切换,可能导致队列操作失败或系统挂起。
9.2 哈希表长度设置为多少合适?
哈希表长度应根据实际 ID 数量和分布情况选择。一般原则: * 长度应为质数,以减少哈希冲突。 * 长度越大,冲突越少,但内存占用越多。 * 建议长度略大于预期节点数量(例如,预期有 10 个节点,长度可设为 13)。
9.3 掩码机制是否支持标准帧 ID?
支持。掩码机制对标准帧和扩展帧同样有效。但标准帧 ID 只有 11 位,掩码应相应调整(如 0x7FF 用于全匹配)。
9.4 如果多个节点使用相同的 ID 和掩码会怎样?
can_list_add_new_node 会检查 ID 是否已存在,如果存在则返回错误代码 4。因此,不允许重复注册相同 ID 的节点。
9.5 回调函数中可以进行耗时操作吗?
强烈不建议 。回调函数在中断上下文(非 RTOS 模式)或任务上下文(RTOS 模式)中执行,耗时操作会阻塞其他消息处理,影响系统实时性。应将耗时操作移至其他任务或使用队列异步处理。
10. 术语表
| 术语 | 全称 / 含义 | 代码中的作用 |
|---|---|---|
| FDCAN | Flexible Data-rate CAN | 一种进阶的 CAN 协议,支持更高的数据传输速率(最高 8 Mbps)和更长的数据帧(最高 64 字节)。 |
| bxCAN | Basic Extended CAN | STM32 传统的 CAN 外设模块,遵循标准的 CAN 2.0B 协议(最高 1 Mbps,8 字节数据)。 |
| HAL | Hardware Abstraction Layer | 硬件抽象层库。代码中大量使用了以 HAL_ 开头的函数来直接操作底层硬件。 |
| FIFO | First In, First Out | 先进先出队列。硬件接收到消息后会先存放在名为 FIFO0 或 FIFO1 的缓冲区中。 |
| ISR | Interrupt Service Routine | 中断服务程序。硬件产生特定事件(如收到消息)时,CPU 强行暂停当前任务去执行的紧急代码。 |
| Callback | 回调函数 | 预先写好的一段逻辑,当满足特定条件(如收到指定 ID)时由系统自动调用。 |
| Hash Table | 哈希表 | 一种数据结构,通过哈希函数将键映射到数组索引,实现快速查找。 |
11. 附录
11.1 CAN 总线基础知识
关于 CAN 总线物理层、差分信号、抗干扰原理等基础知识,请参阅 CAN总线基础。
11.2 源码文件说明
can_list.h:头文件,包含所有公开 API 和配置宏。can_list.c:源文件,实现所有功能逻辑。
11.3 版本历史
- v1.0 (2024-11-24) :初始版本,支持 bxCAN 和 FDCAN,可选 RTOS 集成。
如有问题或建议,请联系模块作者或文档编写者。